
In dem Mitmach- und Experimentier-Labor "teutolab-robotik" der Technischen Fakultät (Universität Bielefeld), dessen Leitung im Mai 2017 von Prof. Dr. Claas Wegner übernommen wurde, haben technisch und naturwissenschaftlich interessierte /begabte Schüler:innen die Möglichkeit, Roboter aus der aktuellen Forschung kennenzulernen, diese zu testen und selbstständig auf Basis einer gemeinsam entwickelten Forschungsfrage zu programmieren.
Roboter als die "Helfer von morgen" betreffen und beeinflussen momentan besonders Bereiche der Industrie und Technik sowie ihre zahlreichen Berufe. Das Verständnis über den Einsatz von Robotern, das heißt unter anderem ein Verständnis über die Kommunikation und Interaktion von Menschen mit Robotern, wird daher zukünftig immer wichtiger.
Das Angebot richtet sich an technisch und naturwissenschaftlich interessierte Schulklassen der Jahrgangsstufe acht bis 12/13. In unterschiedlichen Workshops gehen sie Phänomenen der Robotik aus unterschiedlichen Perspektiven auf den Grund und ergründen den Nutzen dieses neuen Wissenschaftsbereichs an "Tier und Maschine" experimentell.
Ein Ziel des Projekts besteht darin, den Schüler:innen die Möglichkeiten, aber auch die Grenzen von Robotern und ihrer Fähigkeiten sowie ihre Vor- und Nachteile näherzubringen.
Ein weiteres Ziel liegt in der Betrachtung der Schnittstelle zwischen Technik/Robotik und Biologie, der Bionik: Die Nutzung biologischer Strukturen, Eigenschaften und Verhaltensmuster und ihre Übertragung auf die Technik und Industrie bietet als fächerübergreifendes Thema spannende Anreize für Fragstellungen.
Für bionische Angebote kooperiert das  mit dem Projekt
mit dem Projekt ![]()

PLEO ist einem Jungtier des Camarasaurus nachempfunden. Dieser ist ein Langhalssaurier aus dem Zeitalter des Jura.
Entwickelt wurde der Saurier von der Firma Ugobe und gehört jetzt zur Innvo Labs Corporation.
Der Roboter kann auf allen vieren gehen und Kopf sowie Schwanz bewegen, seine Augenlider schließen und den Mund öffnen und schließen. Er simuliert Fraßverhalten und reagiert auf Bewegungen und Geräusche.
In seinem programmierten Verhalten bildet der Roboter Neugeborene, Jung- und Adulttiere nach.
PLEO besteht aus 2000 Einzelteilen, 14 Motoren, 106 Zahnrädern und 38 Sensoren und wird mit der Software "MySkit" betrieben. Mit einer Infrarot-Lichtschranke erkennt PLEO z.B. Futter in seinem Maul. Auch kann er mit anderen PLEOs kommunizieren. Über USB-Schnittstellen kann man in die Software des Roboters eingreifen und mit sog. Development-Kits die "Persönlichkeit" verfeinern.

"AIBO" steht als Kurzform für das japanische Wort "Partner" sowie als Abkürzung für Artificial Intelligence roBOt. Dieser Roboter ist einem Haushund nachempfunden und wurde als Unterhaltungsroboter von Sony entwickelt.
Mittels Kamera, Mikrofonen und teils taktiler Rückmeldung kann der Roboter seine Umgebung wahrnehmen.
AIBO kann durch seine Schnittstelle (OPEN-R) von Grund auf selbst programmiert werden. 2008 gab es beispielsweise ein Roboter-Fußball-Turnier ('Robocup').
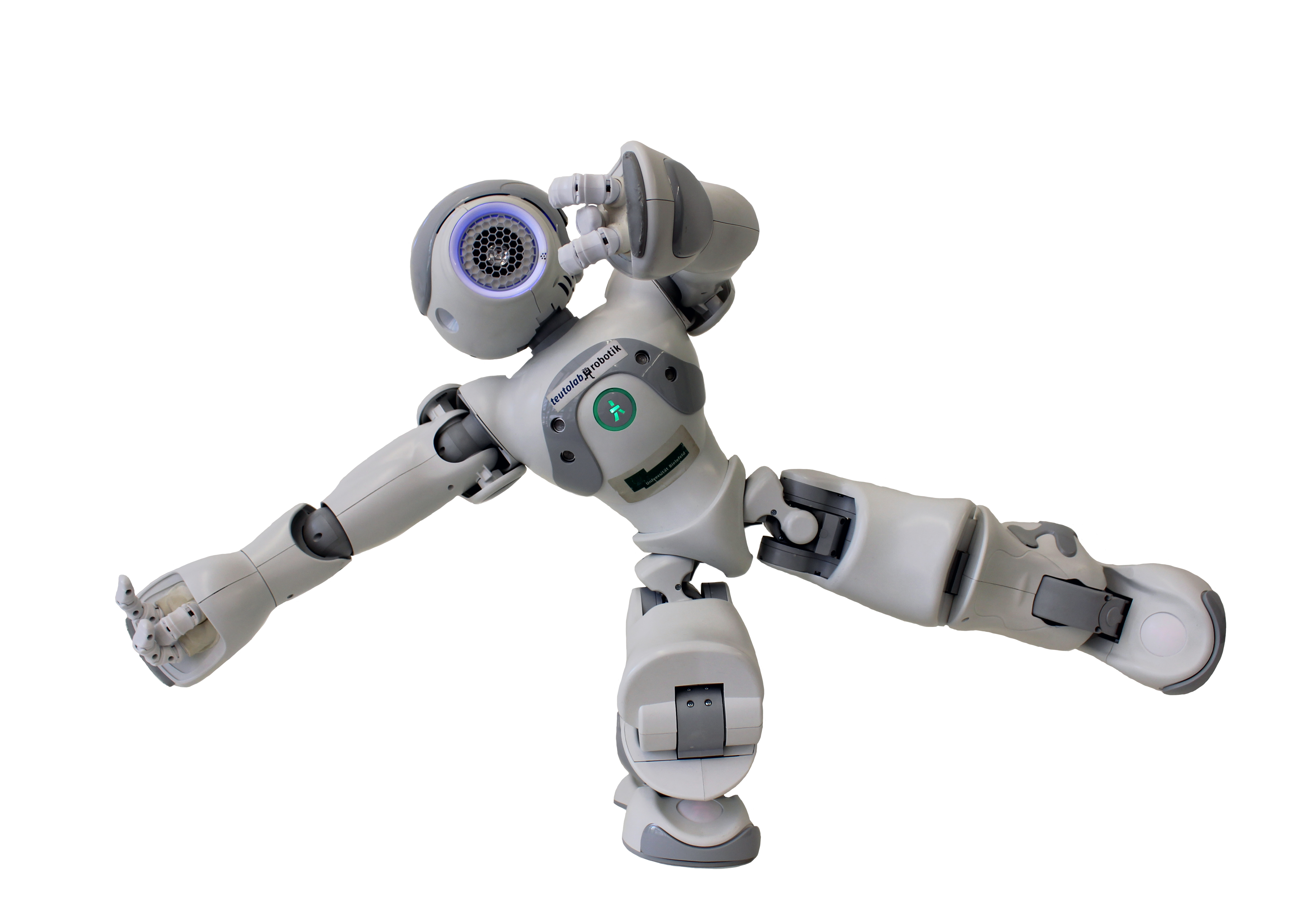
Der NAO ist ein Roboter, der dem Menschen nachempfunden ist ('humanoider Roboter').
Nach der Vorstellung 2006 durch den Hersteller Aldeberan Robotics wurde er 2007 Nachfolger des AIBO von Sony.
NAO gibt es in verschiedenen Ausführungen, die sich durch verschiedene Sensorik und Bewegungsmöglichkeiten in der Komplexität ihrer Fähigkeiten unterscheiden.
NAO ist 58 cm hoch, wiegt etwa 5 Kilogramm und basiert auf einem INTEL Atom Prozessor. Er ist für die Interaktion ausgelegt:
Auch NAO ist entwickelt worden, um ihn zu personalisieren: Steuerungssystem und Programmiersprache wurden freigegeben.
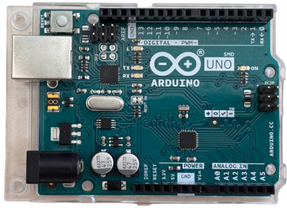
Der Arduino UNO Rev3 SMD als Mikrocontroller der Firma Arduino.cc steuert angeknüpfte Komponenten durch verschiedene Pins an. In dem Sinne besteht die Möglichkeit der Ansteuerung verschiedener Aktoren oder Sensoren durch die Verbindung mit Kabeln.
Die digitalen Pins sowie die analogen Pins befinden sich auf den jeweils gegenüberliegenden Seiten. Mit einem USB-Kabel wird der Arduino mit dem Computer verbunden. Dies ermöglicht unter anderem die Stromversorgung des Arduinos und den angeschlossenen Komponenten.
Mit Tinkercad kann der Arduino blockbasiert programmiert werden. Dort gibt es auch eine Simulation der Programme auf einem digitalen Arduino. Zur Übertragung der Programme werden diese runtergeladen und auf der Software Arduino IDE als C++ Code geöffnet. Alternativ kann die textbasierte Programmierung auch vollständig auf Arduino IDE stattfinden.

Der Ozobot Evo ist ein 3 cm großer programmierbarer Roboter auf zwei Rädern der Firma Ozo EDU, Inc.
Mit Sensoren an der Unterseite des Ozobots kann dieser nicht nur Linien hinterherfahren, sondern auch unterschiedliche Aktionen bei unterschiedlichen Kombinationen aus Farben auf den Linien vollführen.
Durch die Programmieroberfläche OzoBlockly ist zusätzlich eine digitale Programmierung mit Blöcken durchführbar. Dazu besteht die Möglichkeit der Programmierung von LEDs, Tönen oder den Infrarotsensoren, die bei der Programmierung den Abstand zwischen dem Ozobot zu einem Objekt nutzen. Hindernisse werden damit erkannt und umfahren. Je zwei Infrarotsensoren sind vorne und hinten am Ozobot befestigt.
Insgesamt sing fünf Level der Programmierung auf OzoBlockly möglich, um unterschiedliche Schwierigkeitsstufen der Programmierung zu nutzen.
Eine Bluetooth-Verbindung bietet zudem eine schnelle Übertragung der Programme auf den Ozobot.
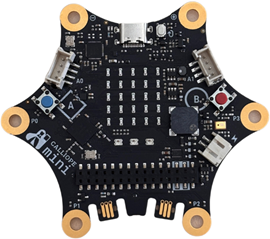
Der Calliope mini 3.0 der Firma Calliope GmbH ist ein Mikrocontroller mit vielen eingebauten Komponenten.
Durch unterschiedliche Pins am Calliope werden weitere Komponenten wie Sensoren an den Calliope befestigt. Zusätzlich besteht die Möglichkeit, die zwei festsitzenden Grove-Anschlüsse zu verwenden, sowie die Ringpads durch Krokodilklemmen. Ohne Krokodilklemmen können auch vier der Ringpads als Touchpins programmiert werden. Mit einer Berührung der Touchpins wird damit die Aktion, die im Programmcode mit dem Touchpin verknüpft ist, ausgeführt. Auch das Logo auf der Rückseite des Calliope verfügt über die Funktion des Touchpins, wie es in der Abbildung markiert ist.
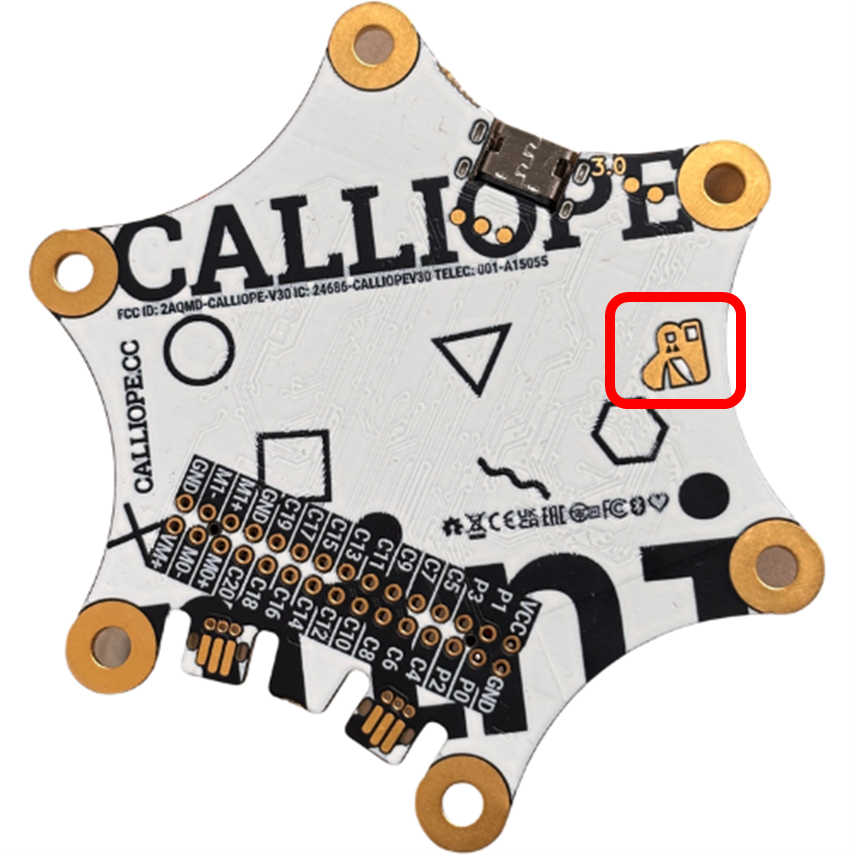 Abbildung 1 Das Logo vom Calliope Mini in rot markiert.
Abbildung 1 Das Logo vom Calliope Mini in rot markiert.
Ganz zentral im Mittelpunkt des Calliope befindet sich die LED-Matrix mit drei RGB-LEDs darunter. Mit zwei einbauten Drucktastern lassen sich die Programme auf Knopfdruck programmieren. Zusätzlich sind Sensoren für die Erkennung von Temperatur und Licht eingebaut. Bewegungen mit dem Calliope werden mithilfe des Kompasses, Beschleunigungssensors und des Bewegungssensors identifiziert. Ein Mikrofon ermöglicht eine Tonaufnahme und durch einen Lautsprecher ist eine Tonausgabe möglich.
Unteranderem wird Makecode für die Programmierung des Calliope verwendet. Die Programmierung ist blockbasiert und kann mit Erweiterungen ausgestattet werden, um weitere Komponenten zu verwenden.

Die Cubelets sind vorprogrammierte Würfel mit unterschiedlichen Funktionen, die miteinander kombiniert werden, um einen funktionsfähigen Roboter zu erhalten. Eine Programmierung ohne ein weiteres digitales Endgerät wird damit ermöglicht. Um die Funktionen der Würfel auszuführen, braucht der fertige Roboter mindestens drei zentrale Arten von Cubelets. Für die Stromversorgung ist ein dunkelblauer eingeschalteter Cubelet nötig. Dieser wird vor der Nutzung aufgeladen.
Durch einen Würfel mit Sensoren werden Daten empfangen. Das Resultat der Daten wird durch einen weiteren Würfel ausgeführt. Das Zusammenfügen der Würfel erfolgt durch die Magneten an den Seiten. Mit dem Zusammenfügen beeinflussen sich die einzelnen Cubelets gegenseitig, wodurch die Stromversorgung von dem einen Würfel dafür sorgt, dass die anderen Würfel aktiviert werden.
Unterschiedliche Kombinationen der Cubelets sorgen so nicht nur für ein unterschiedliches Design, sondern auch für unterschiedliche Aktivitäten.
Im Rahmen einer Abschlussarbeit wurde im teutolab-robotik eine Lernsoftware entwickelt und für den Gebrauch in den teutolab-robotik Satellitenlaboren und Ferienangeboten weiterentwickelt. Die Lernsoftware bietet einige Vorteile für die Arbeit mit Mikrocontrollern im Unterricht. Die Arbeitsmaterialien liegen gebündelt in der Lernsoftware vor und werden passend zur gewählten Lektion angezeigt. Die Funktionsübersicht bietet eine übersichtliche Zusammenfassung der gelernten Konzepte und Funktionen. Der erstellte Programmcode wird automatisch gespeichert und ist für spätere Besprechungen leicht verfügbar. Eine Simulationsumgebung ermöglicht schnelles Testen des Programmcodes und auch das Arbeiten ohne Hardware. Unsere Ergebnisse würden wir gerne mit Ihnen teilen.
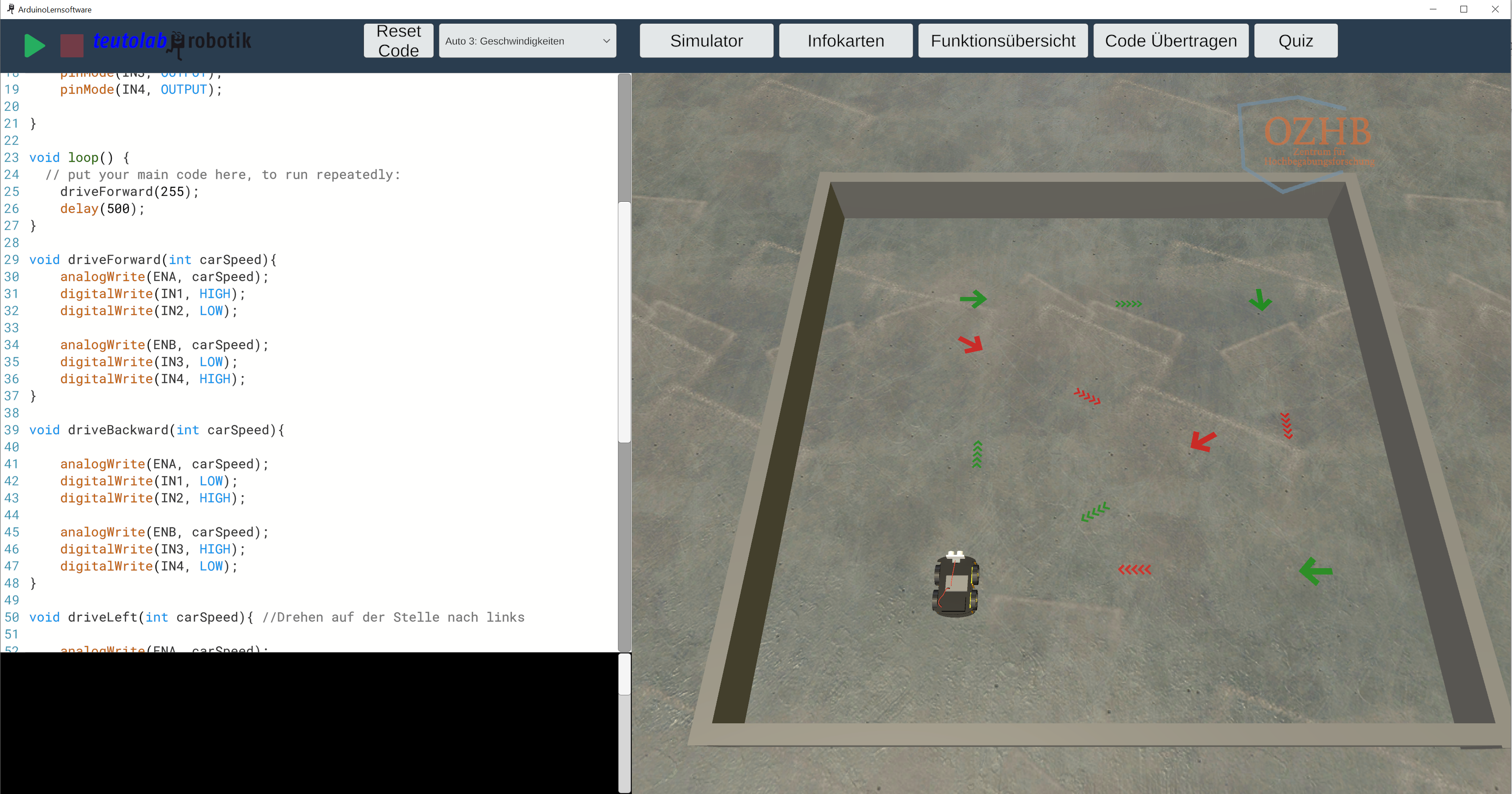
Hier haben Sie die Möglichkeit eine erste Version der Lernsoftware herunterzuladen und auszuprobieren. Bitte beachten Sie auch die Downloadanleitung, wenn Sie mit der Lernsoftware arbeiten wollen.
Um unsere Angebote stetig zu verbessern, sind wir auf Ihre Rückmeldungen angewiesen. Wir würden uns freuen, wenn Sie sich 5-10 Minuten Zeit nehmen, um den Einsatz der Lernsoftware (in Ihrem Unterricht) in einem kurzen Fragebogen zu bewerten. Vielen Dank für die Teilnahme!
